
The newly configured camera. Can you spot the difference?
Note!: I have since made further discoveries with regard to the optical train. The configuration above is correct except for the auto-guider configuration. See later posts!
I was a little worried about my camera’s configuration. For a start I knew its length did not meet the ‘official’ 75mm back-focus requirement, plus I was concerned about the difficulty in trying to achieve focus with the auto-guiding camera.
A quick visit to the Cloudy Nights Forums revealed all – thank you Eliekh! 🙂
It turns out that the Skywatcher manual is not entirely accurate when it comes to the back-focus requirement for their field-flattener. The actual measurement is 55mm of back-focus starting from the field-flattener’s M48 adapter – not the 75mm quoted in the manual!
This 55mm measurement is somewhat of an industry standard – In theory I could add an SLR camera to my telescope and it would work perfectly or if my camera was setup for 55mm of back-focus, it should be able to couple with other telescopes without any additional configuration.
The big clue to all this is that the ZWO ASI 1600 Pro camera comes with two seemingly random spacers – a 21mm one and a 16.5mm one. It turns out that these spacers represent the widths of the ZWO filter wheel and OAG respectively.
The idea being that if you were to plug the camera right in, you would leave both spacers in the optical train. If for example, you were to add a filter wheel, you would replace the 21mm spacer with the filter wheel and so on – thus always retaining the same length of the optical train.
What this means is that ZWO have very cleverly provided you with all the adapters to suit every possible standard equipment scenario!
In my case, I had both the filter wheel and the off-axis-guider (OAG), so for my system I had to remove both of the spacers as the distance they used to take up is now taken up by my additional equipment.
One other issue that also came to light is that my main camera apparently came with an additional 10mm spacer fitted to its front face. I never saw this spacer, so I didn’t think I had one. However, the documentation and forums insisted that my package would have had one.
So where did it go?
After a lot of searching through all my adapters I found the 10mm spacer – it was nicely hidden in the lens cap of the main camera!!! – I always thought that lens cap felt a little heavy! 🙂
This 10mm spacer is important. It must be included into the optical train to ensure that the 55mm back-focus requirement is met. However, the trick that I missed, is that when using the filter wheel, the nose piece MUST be transferred from the front of the camera to the front of the filter wheel.
The upshot of this alteration is that the OAG is no longer right up against the filter wheel – it now has a 10mm gap between itself and the wheel. This extra 10mm is designed to ensure that the autoguider camera is always in focus when the main camera is in focus – ie they become par-focal.
This explains why I had a lot of trouble focusing the autoguider – I was missing a crucial piece from the optical train!
Given the myriad of configurations offered by all of the various parts that arrive with the kit, it can be very difficult to know what goes where. The diagram below provides the definitive configuration for people using a ZWO ASI 1600 camera with a ZWO EFW filter wheel in combination with the ZWO off axis guider (OAG) – this will provide the required 55mm of back-focus:
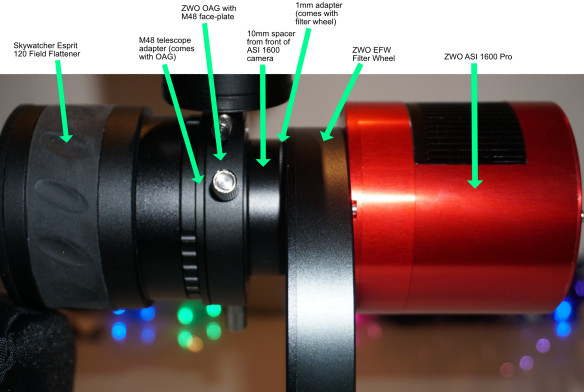
The parts breakdown for the correct camera configuration to suit most standard back-focus requirements. The full-sized image can be viewed here.
I hope the above diagram helps people as it is genuinely difficult trying to locate this sort of information!
I’m now looking forward to testing my newly configured system to see how it performs!
Clear Skies
RobP
